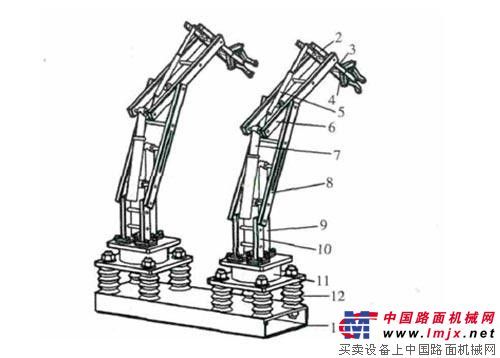
基于安装在蛇形吊臂底部的辅助轴承,线路工人可以操作吊臂进行旋转,这使其在电杆处作业时更加灵活,如能够根据作业需要架起电线,方便在电线之间的操作%该辅助轴承安装在吊臂主杆插槽的上部,布置在水平工作斗的左侧,以避免与正常作业发生干涉;轴套采用复合材料,以减少对插槽的磨损。
随着近些年高空作业机械的不断发展,高空作业平台的产品不断完善,各种新型技术和新型材料的不断出现,使得高空作业平台的进一步发展成为可能,其发展方向概括起来可以分为五大方面: (1)巨型化 随着我国城市化水平的不断提高,我国城市高楼数量急剧增加,楼房的高度也不断地增长,这就对大高度高空作业平台产生了需求,因。
高空作业车主要应用在船舶、建筑、消防、港口等行业。转台结构的合理设计对高空作业车在工作时有着非常重要的作用。转台传统设计方法是手工计算方法,计算复杂,而且没有考虑变幅集中力等载荷的影响,误差较大,难以准确的反映转台的真正受力状况。随着有限元理论的不断完善及有限元软件功能的不断提高,有限元法在工程实践得到较广泛的应用。
高空作业平台的安全保障最重要的部件就是传感器了,在高空作业平台上使用的传感器有: 支腿压力传感器能检测放置地面后所受压力,当高空作业平台在斜坡上时,需要用双轴传感器来测试是否能安全作业,当臂式高空作业平台在升起过程中,臂架的角度是否保证平台不失重需要双长度/角度传感器来检测,以及吊篮是否超重需要的称重传感器,吊。
高空作业平台(简称高空作业车)是21世纪最新用来运送工作人员和装备到指定高度的一种可移动工程机械设备。本文在分析高空作业平台机械系统结构、液压系统和使用功能的基础上,研究了高空作业平台的安全使用。
蜘蛛型高空作业平台与自行式高空作业平台相比最大的优势在于:蜘蛛式高空作业平台能适应更多复杂的场地工作。这一优势,就算是履带式的不同高空作业平台都是无法胜任的,例如在斜坡、土壤比较松散等地方,蜘蛛式高空作业平台都能轻松保持平衡。
高空作业平台调平系统的动态性能直接关系着高空作业人员的安全,是高空作业工程机械中的重要部分。由于高空作业通常在几十米甚至上百米,而且为了减轻重量,作业机构的刚度设计的都较小,再加上高空作业外部干扰以及负载扰动等因素的影响,调平系统响应滞后以及作业平台不稳定的问题十分突出。
为解决高压线路人工带电作业带来的安全问题,运想重工利用Solidworks设计了高空带电作业车机械手的绝缘机构、旋转台、机械臂、液压机构、机械手末端、专用夹具等,通过分析机械手动作的实现原理及各部件的相互驱动关系,并利用Solidworks的运动仿真功能进行了取线、对准与接线、断线工作的模拟分析。
GTBZ25高空作业平台的臂架和工作平台铰接,随着臂架的运动,工作平台将工作人员和工具运送到高空进行作业。臂架铰接在转台上,能够随着转台在水平面内旋转360°,因此不用移动机器,便能使工作人员在大范围内作业。
剪叉式高空作业平台具有较好的稳定性及较高的承载力,这与其特有的剪叉式结构是分不开的,此外其还具有噪声小、行程大和安装空间小等诸多优点。已被广泛应用于生产和生活当中。运想重工在对剪叉式高空作业平台结构分析的基础上,对其进行了受力分析,并构建了力学模型。以液压缸最大推力为目标,寻求到影响其大小的关键参数。