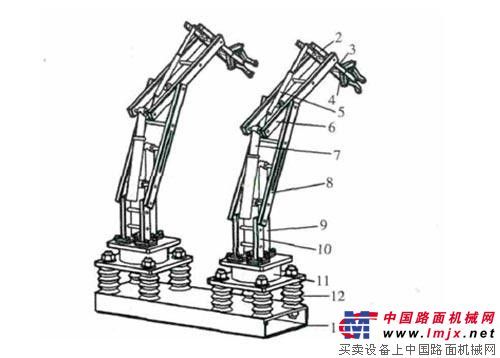
为解决高压线路人工带电作业带来的安全问题,运想重工利用Solidworks设计了高空带电作业车机械手的绝缘机构、旋转台、机械臂、液压机构、机械手末端、专用夹具等,通过分析机械手动作的实现原理及各部件的相互驱动关系,并利用Solidworks的运动仿真功能进行了取线、对准与接线、断线工作的模拟分析。
GTBZ25高空作业平台的臂架和工作平台铰接,随着臂架的运动,工作平台将工作人员和工具运送到高空进行作业。臂架铰接在转台上,能够随着转台在水平面内旋转360°,因此不用移动机器,便能使工作人员在大范围内作业。
剪叉式高空作业平台具有较好的稳定性及较高的承载力,这与其特有的剪叉式结构是分不开的,此外其还具有噪声小、行程大和安装空间小等诸多优点。已被广泛应用于生产和生活当中。运想重工在对剪叉式高空作业平台结构分析的基础上,对其进行了受力分析,并构建了力学模型。以液压缸最大推力为目标,寻求到影响其大小的关键参数。
高空作业平台是21世纪一种新型的将作业人员、工具、材料等通过作业平台举升到空中指定位置进行各种安装、维修的专用高空作业机械,属于工程机械,是一种重要的施工设备。 运想重工高空作业平台的专业性体现在: 一、其高空作业的安全性能要求比一般工程车辆高。
高空作业平台行业规范管理的迫切性 长期以来,由于历史的原因,对高空作业的吊篮定位不清,有作为起重机械管理,有作为工具脚手架管理。吊篮管理职能分散在多个部门,各部门互不通气,认证要求不一致,证件互不相认。
折叠式高空作业车臂架是高空作业车的升降机械运动部分,由臂架、关节和末端工作台构成,是一系列连接在一起的开链臂杆,对臂架系统建模即是对这些开链臂杆推导数学模型,最终目的是为控制策略的研究提供动力学基础。
目前,高空作业平台的应用已经十分广泛了,高空作业平台的安全性也越来越受到关注了,而其中超载的问题是引发高空作业平台安全事故的最主要的原因之一。最早生产的高空作业平台是通过操作人员自行来来判断工作平台的载重,这样对操作人员的经验要求非常的高,且人为因素影响较大,难以保证高空作业平台设备的可靠性与安全性"为此。
高空作业车自问世以来,市场需求一直呈上升趋势。由于用户对改善其作业方法与生产率的期待和相关法律法规的推行,使得原本就有很大发展的高空作业车行业进一步向前发展。美国、日本和西欧等各主要工业国是高空作业车需求的第一市场。中国、亚洲各新兴工业国家对高空作业车的需求也在不断扩大。
目前,对于大部分中国工程机械产品来说,市场都是处于低潮期。对于高空作业平台来说,虽然不能说是朝阳产业,却是目前唯一没有被过度发展过的行业,因此我认为高空作业平台会有非常大的发展空间,甚至可以说没有人知道能大到什么程度。之所以这么说,是因为和起重机、挖掘机相比,高空作业平台不是施工必需的设备,目前使用的还不普遍。